
Post-Flight Analysis: Near Engine Failure (RPM Gauge Anomaly)
Intro
What would you do if your RPM gauge started fluctuating at 1,000 RPM during a full-power climb at night?
I recently faced this exact scenario on an IFR flight. Although I chose a precautionary landing over declaring an emergency, the experience revealed some critical gaps in my ADM. Here is a raw debrief of what happened during my night flight and what I learned.
About the Flight
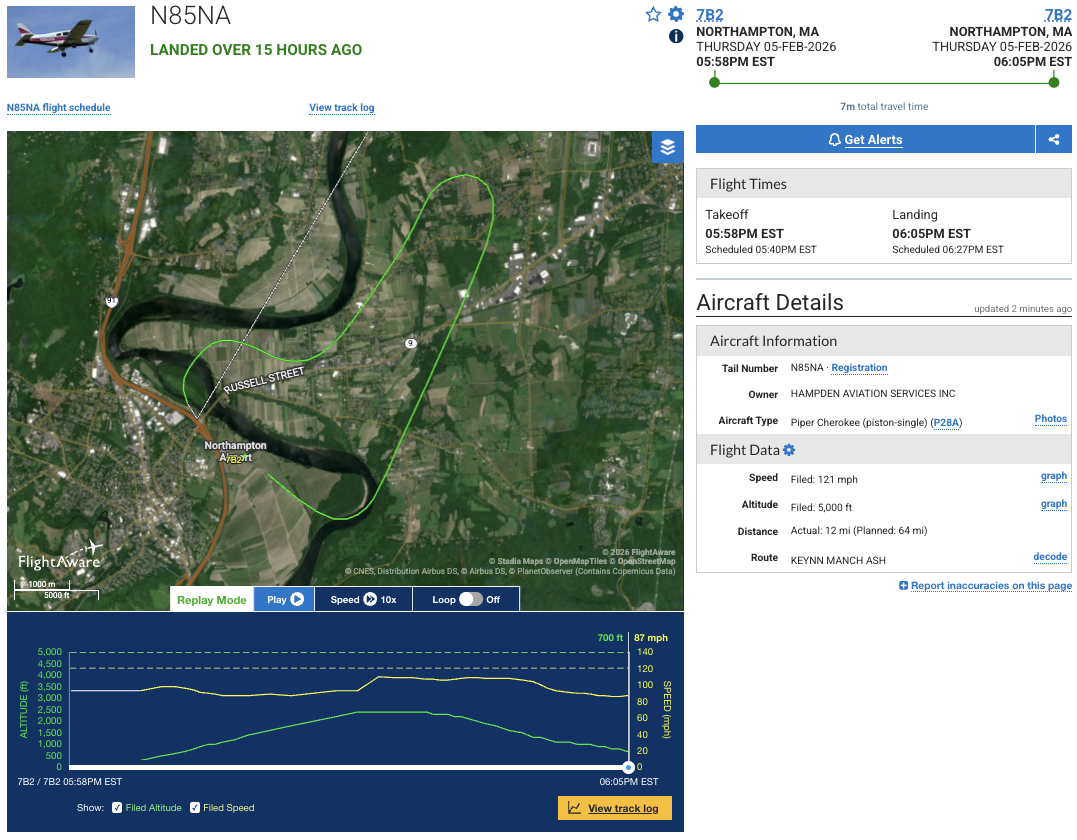
- Date: Feb 5th, 2026
- Time: Night Operation (Sunset 17:30, Takeoff 17:58, Land 18:05)
- Weather: VFR (Wind calm, Vis 10+, Sky clear, Temp -10℃, Altimeter 29.92)
- Flight Plan: IFR Filed
- CRAFT: 7B2 KEYNN MANCH KASH, 3000ft/5000ft 10minute, Bradley Approach 125.35, Squawk 5304
- PIC: Me, ASEL 216.4, PIC 139.4, Night PIC 23.5, INST (real 1.9, hood 51.2), XC 111.4
⚠️ The Incident
- Situation: Contacted Approach after departure, cleared to climb and maintain 5,000ft
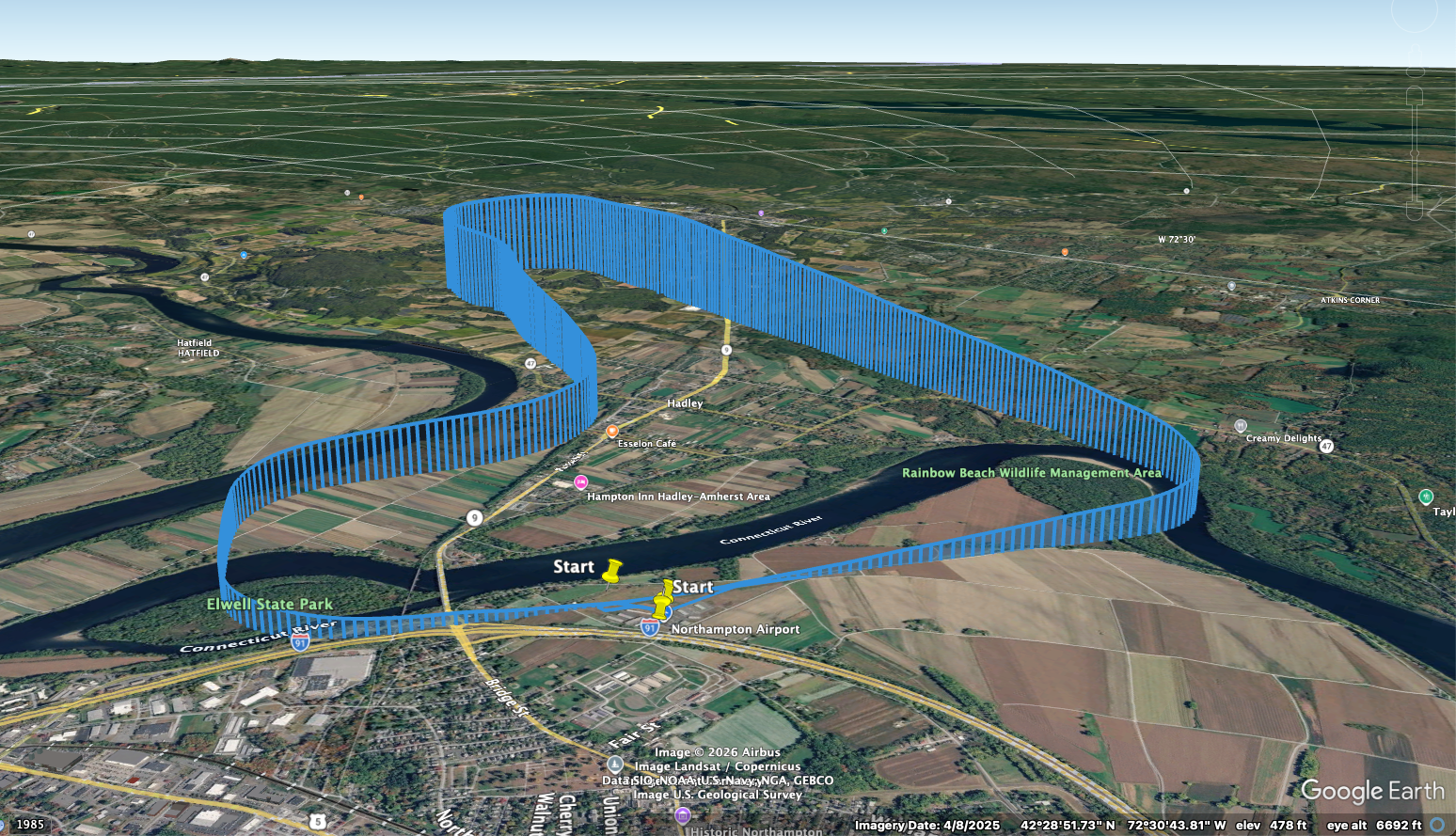
- RPM gauge anomaly: While climbing through 2,300’ (approx. 3NM Northeast of 7B2), I noticed an anomaly on the RPM gauge. Despite being at full throttle and mixture, the needle was bouncing erratically between 1,000 and 1,500 RPM.
- Immediate Assessment: check fuel tanks, engine gauges, full mixture/throttle, fuel pump ON. No abnormal engine sounds, no smells, airspeed and altitude remained stable.
What Went Well (The Good)
- Monitoring & Early Detection: Continuous scanning of engine gauges during the climb allowed for early identification of the erratic RPM.
- Composure: I remained calm and avoided panicking.
- Power Check: My safety pilot suggested a brief full-power burst while descending from 2,500’ to 1,100’ within a 1.5 NM distance at idle. This was an excellent move to verify the engine’s actual responsiveness.
- Energy Management: Maintained a tight pattern after entry for a safe landing.
- DECIDE Model Application:
- Note: Rather than consciously following the model, my thought process naturally flowed through these stages.
- Detect: Identified the RPM fluctuation at 2,300’ early in the climb.
- Estimate: Confirmed engine sound and flight parameters were normal, but decided the unstable gauge made it unsafe to continue the flight.
- Choose: Decided to return to the departure airport (7B2).
- Identify: Planned to cancel IFR with ATC, inform them of the situation, and initiate a turn.
- Do: Executed the plan, flew a tight base turn, and landed safely.
- Evaluate: Conducted this post-flight review as part of the final evaluation.
Areas for Improvement
1. Navigation
I should have executed a “Direct-to 7B2” on the GPS immediately to get a bearing on the HSI. While I tried to identify the airport visually first, the lack of visual cues at night delayed my situational awareness. In an abnormal situation at night with high-workload, relying solely on eyes outside can be deceptive. Always use the “Direct-To” function as a primary source of orientation before attempting to acquire the field visually especially at night.
Takeaway: Utilize System-Based Orientation over Visual Search (especially at night)
2. Radio Communication
I was preoccupied with the thought of canceling my IFR flight plan. Because I was landing at a non-towered airport, I was worried that I might forget to cancel it later, which would unnecessarily trigger a Search and Rescue (SAR) mission. This concern, combined with the stress of the situation, made it difficult to find the right words for ATC. My thoughts became cluttered, and as I tried to speak too quickly, my radio calls became rushed and disorganized. Even when the controller asked, “Verify you are canceling IFR,” a simple “Affirmative” would have been enough. Instead, I gave a long-winded explanation that wasn’t necessary.
- Better Approach: Keep it simple and direct. “Approach, 85NA, engine issues, turning direct to Northampton, cancel IFR.”
- I didn’t need to over-explain. Focus on clear, concise communication.
Takeaway: Keep it brief when the workload is high.
3. Checklist Usage
I failed to perform a formal “Do-and-Verify” of the Engine Roughness or Engine Failure checklist. To be fair, since the engine sounded normal and my flight data was stable, I assumed the engine was fine and didn’t think I needed the checklist for what seemed like just a gauge glitch. Furthermore, being just 3NM from the runway at 2,400ft (well above the 1,100ft TPA), my mental bandwidth was entirely occupied with planning the pattern entry and landing. However, despite these factors, I should have at least verified the “Engine Roughness” checklist to confirm the engine’s health.
Takeaway: Always verify with the checklist, even if the issue seems like a sensor failure.
4. Post Flight
Post-flight Inspection I should have performed a more thorough visual inspection of the engine bay after landing to check for any mechanical causes.
Self Reflection
- My Judgment: I assessed that a formal deviation or emergency declaration wasn’t necessary at the moment. I focused on canceling the IFR flight plan first before initiating the turn.
- Q1: Was canceling IFR the best choice? What if the engine had actually failed right after I canceled the flight plan? Instead of being so worried about the IFR cancellation, wouldn’t it have been safer to simply say, “Declaring emergency, engine issue, turning direct 7B2”? By keeping the IFR or declaring an emergency, either way would have given me priority handling and reduced my workload by having ATC monitor my terrain clearance.
- Q2: What if this happened at an unfamiliar airport? I was lucky that this happened at my home base where I know the terrain well. If I were over unfamiliar territory at night, canceling IFR would have been a much riskier move. Staying on the IFR plan would have ensured I had radar vectors and terrain clearance until the runway was in sight.
Final Thoughts
- Through this real-world ADM (Aeronautical Decision-Making) experience, I was able to objectively identify the areas where I still need improvement.
- While the outcome was safe, it highlighted the critical importance of utilizing all available resources—GPS, ATC, and checklists—during an abnormal situation, especially at night.